Prismatic Joint Dh Parameters . So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the two links it connects.
from www.numerade.com
So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the two links it connects. • need to define the coordinates of frames.
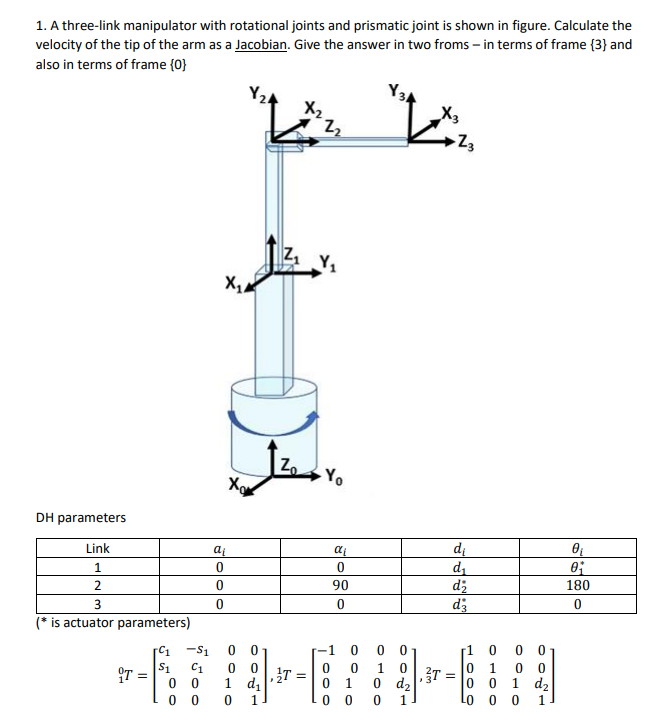
SOLVED 1. A threelink manipulator with rotational joints and
Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the two links it connects. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'.
From www.researchgate.net
Model of a prismatic joint. Download Scientific Diagram Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. • need to define the coordinates of frames. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From www.chegg.com
PART IV. DH TRaNsFORMS FOR PRISMATIC JOINTS Consider Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the two links it connects. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or. Prismatic Joint Dh Parameters.
From www.numerade.com
SOLVED A 3DOF spherical manipulator (RRP) has the following DH Prismatic Joint Dh Parameters Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. • need to define the coordinates of frames. These actuators are movable parts and cause relative motion between the two links it connects. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which. Prismatic Joint Dh Parameters.
From www.youtube.com
4.2 DH Parameters YouTube Prismatic Joint Dh Parameters • need to define the coordinates of frames. These actuators are movable parts and cause relative motion between the two links it connects. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. Each joint, like the elbow, can be classified as a revolute (r) joint or. Prismatic Joint Dh Parameters.
From www.chegg.com
A 3dof robotic arm consists of one prismatic joint Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the two links it connects. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. • need to define. Prismatic Joint Dh Parameters.
From www.numerade.com
DenavitHartenberg Convention The Stanford Robotic Arm is shown in Prismatic Joint Dh Parameters Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define the coordinates of frames. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From www.numerade.com
VIDEO solution The figure below shows a robot having four degrees of Prismatic Joint Dh Parameters Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the two links it connects. • need to define. Prismatic Joint Dh Parameters.
From www.researchgate.net
DH frames of SCARA [15]. Download Scientific Diagram Prismatic Joint Dh Parameters • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From www.numerade.com
SOLVED 1. A threelink manipulator with rotational joints and Prismatic Joint Dh Parameters Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the two links it connects. • need to define. Prismatic Joint Dh Parameters.
From www.numerade.com
SOLVED Problem 3 For the threelink RRP manipulator shown below Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. • need to define the coordinates of frames. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From robotics.stackexchange.com
kinematics Adding 90 degrees to DH parameter Robotics Stack Exchange Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the two links it connects. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or. Prismatic Joint Dh Parameters.
From www.youtube.com
L5 DH Parameter RPR part2 YouTube Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From www.youtube.com
L1 DH Parameter and Coordinate system YouTube Prismatic Joint Dh Parameters Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the two links it connects. • need to define the coordinates of frames. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which. Prismatic Joint Dh Parameters.
From www.numerade.com
SOLVED The figure presents a 3 degrees of freedom RPP (Rotational Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From robotics.stackexchange.com
dh parameters Denavit Hartenberg Exercises Robotics Stack Exchange Prismatic Joint Dh Parameters These actuators are movable parts and cause relative motion between the two links it connects. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define. Prismatic Joint Dh Parameters.
From www.researchgate.net
DenavitHartenberg parameters. Download Scientific Diagram Prismatic Joint Dh Parameters • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From www.youtube.com
S7 Forward Kinematics Modified DH Parameters YouTube Prismatic Joint Dh Parameters Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define the coordinates of frames. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.
From en.ppt-online.org
Manipulator Kinematics, Link Description, Link Connections online Prismatic Joint Dh Parameters So, for a given type of joint, i.e., revolute or prismatic, one of the dh parameters is variable, which is called 'joint variable,'. • need to define the coordinates of frames. Each joint, like the elbow, can be classified as a revolute (r) joint or a prismatic (p) joint. These actuators are movable parts and cause relative motion between the. Prismatic Joint Dh Parameters.